Location Where Is The Transfer Case Control Module Located
The humble transfer case control module (TCCM) – a component rarely discussed but absolutely critical in four-wheel-drive (4WD) and all-wheel-drive (AWD) vehicles. Its location, typically tucked away behind a trim panel, under a seat, or even integrated within the transmission control unit, is often a mystery to the average driver. However, as automotive technology races forward, the role and even the existence of the TCCM is undergoing a dramatic transformation, especially in the era of electrification and smart mobility solutions.
The Traditional TCCM: A Brief Overview
Before diving into the future, let's recap the TCCM's function. In essence, it acts as the brain for the transfer case. It receives inputs from various sensors – wheel speed sensors, throttle position sensors, and driver-selectable mode switches (2WD, 4WD High, 4WD Low) – and then commands actuators within the transfer case to engage or disengage different drive modes. This involves shifting gears within the transfer case or engaging electromagnetic clutches to distribute torque appropriately. The reliability of this system hinges on the TCCM's processing power, the accuracy of the sensors, and the robustness of the actuators.
Common locations for the TCCM include:
- Beneath the driver or passenger seat.
- Behind the glove compartment.
- Integrated within the transmission control module (TCM) – a trend that is becoming increasingly common.
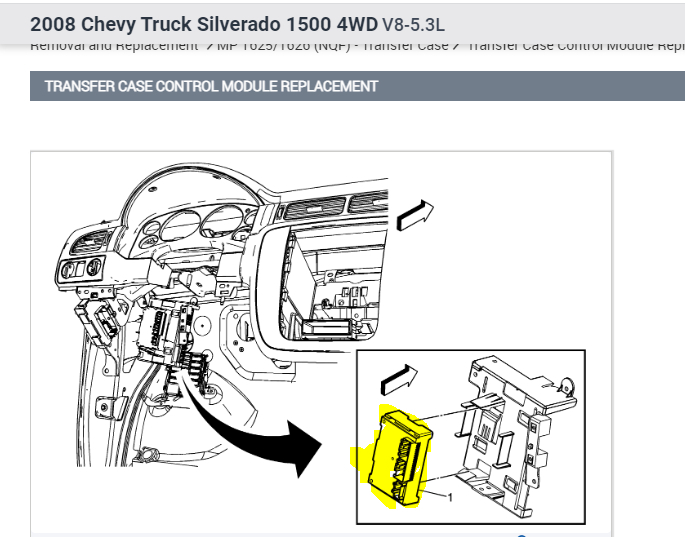
- Underneath the dashboard, often near the steering column.
Diagnosing TCCM issues can be challenging, often requiring specialized scan tools to read diagnostic trouble codes (DTCs) and interpret sensor data. A faulty TCCM can manifest in a variety of ways, from the inability to engage 4WD to erratic shifting or even complete failure of the 4WD system. While relatively robust, TCCMs are susceptible to damage from water intrusion, voltage spikes, and physical impact.
The Electrification Revolution and the TCCM
The rise of electric vehicles (EVs) and hybrid electric vehicles (HEVs) is fundamentally reshaping the landscape of drivetrain technology. While traditional transfer cases are mechanically complex, involving gears, chains, and clutches, electric drivetrains offer a simpler, more elegant solution for achieving AWD. Instead of a single engine and a transfer case, EVs often employ multiple electric motors – typically one for each axle. This inherently provides AWD capability. The need for a traditional TCCM diminishes significantly in this architecture.
However, the concept of torque distribution and mode selection still exists. In multi-motor EVs, a central control unit, often integrated within the vehicle's overall electronic control unit (ECU), manages the torque output of each motor independently. This allows for sophisticated torque vectoring strategies, optimizing traction and stability in various driving conditions. This central control unit effectively assumes the responsibilities of the traditional TCCM, but with a far greater degree of precision and control. The response time is also significantly faster, leading to a more seamless and responsive driving experience. Think of the responsiveness when accelerating hard in a Tesla Model S Plaid – that level of torque distribution is only possible through electric motor management.
Hybrid systems present a more complex scenario. Some hybrids retain a traditional transfer case, particularly those based on existing internal combustion engine (ICE) platforms. In these cases, the TCCM might still be present, although its integration with the electric drivetrain components requires sophisticated software and control strategies. Other hybrid systems adopt a "through-the-road" AWD approach, where the front wheels are powered by the ICE and the rear wheels are powered by an electric motor. In these configurations, there is no mechanical connection between the front and rear axles, and the electric motor control unit effectively manages the rear-wheel drive, mirroring the functionality of a TCCM in a traditional AWD system. The challenge here is seamless integration between ICE and electric motor control.
Challenges in EV/Hybrid AWD Systems
While electric AWD offers numerous advantages, it also presents its own set of challenges:
- Software Complexity: Managing the torque distribution between multiple motors requires sophisticated algorithms and robust software. Any glitches or errors in the software can lead to unpredictable behavior and safety concerns. Over-the-air (OTA) updates become crucial for addressing software bugs and improving performance.
- Thermal Management: Electric motors generate heat, especially under high-load conditions. Effective thermal management systems are essential to prevent overheating and maintain optimal performance. This adds to the complexity and cost of the system.
- Battery Consumption: Continuously engaging AWD, even in optimal conditions, can significantly impact battery range. Optimizing torque distribution algorithms to minimize energy consumption is a critical area of research and development.
- Cost: Multi-motor electric drivetrains are currently more expensive than traditional mechanical AWD systems. As technology matures and production scales up, the cost is expected to decrease, but it remains a significant barrier to entry for some consumers.
Smart Automotive Solutions and the Evolving Role of AWD
Beyond electrification, the rise of smart automotive solutions, including advanced driver-assistance systems (ADAS) and autonomous driving technologies, is further transforming the role of AWD. In the future, AWD systems will be more than just a means of improving traction in slippery conditions. They will become integral components of a vehicle's overall safety and stability control system.
Imagine a scenario where a self-driving car encounters a patch of black ice. The vehicle's sensors detect the reduced traction and, in real-time, adjust the torque distribution to each wheel to maintain stability and prevent a loss of control. This requires seamless integration between the AWD system, the ABS, the stability control system, and the autonomous driving algorithms. The traditional TCCM, in its discrete form, is no longer sufficient to handle this level of complexity. Instead, a centralized vehicle control unit manages all these functions in a coordinated and integrated manner. This also means faster reaction times and the ability to prevent accidents, not just react to them.
Furthermore, smart automotive solutions can leverage real-time data from cloud-based sources to anticipate changing road conditions. For example, if a weather forecast predicts snow in a particular area, the vehicle can proactively adjust its AWD settings to prepare for the slippery conditions. This level of predictive capability enhances safety and provides a more comfortable driving experience. This kind of preventative measure will rely on constant connectivity.
The Future: A Vision of Seamless and Intelligent Mobility
The future of mobility is one of seamless integration and intelligent control. The traditional TCCM, as a standalone component, will gradually disappear, its functionality absorbed into more sophisticated and integrated vehicle control systems. AWD systems will evolve from simple traction aids to essential components of a vehicle's overall safety and performance architecture.
We envision a future where vehicles can autonomously adapt to any road condition, optimizing torque distribution in real-time to maximize traction, stability, and energy efficiency. These systems will be seamlessly integrated with advanced driver-assistance systems and autonomous driving technologies, creating a safer and more enjoyable driving experience. The location of the "TCCM" will become irrelevant, as its functions are distributed across a network of interconnected sensors, actuators, and control units, all working in harmony to deliver a truly intelligent and adaptive driving experience. Perhaps the term TCCM will itself be retired, replaced by a more encompassing term like "Drivetrain Management System" or "Vehicle Dynamics Controller."
This transition will not be without its challenges. Cybersecurity will become paramount, as hackers could potentially exploit vulnerabilities in the vehicle's control systems to disrupt or even disable critical functions. Robust cybersecurity measures will be essential to ensure the safety and security of autonomous vehicles. Furthermore, standardization of communication protocols and data formats will be crucial to enable seamless integration between different vehicle systems and cloud-based services.
Despite these challenges, the future of mobility is bright. By embracing innovation and focusing on safety, sustainability, and user experience, we can create a transportation system that is more efficient, more accessible, and more enjoyable for everyone.